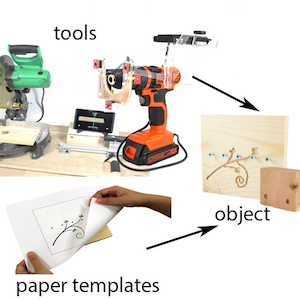
Mapping techniques from software tutorials onto physical craft processes can assist novices in building multi-material assemblies. By providing in-situ step instructions and progress tracking, generating dynamic feedback on technique, and adapting tutorial content to a user's specific context and preferences, an ecosystem of smart tools can guide users through complete project tutorials. We demonstrate how such techniques can be enabled by augmenting common workshop tools (drill/driver, saw, router) with measurement, state sensing and interactive feedback; and by sequencing instructions across multiple tools. We validate the benefits of a smart tool ecosystem through reflections on a series of author-created design examples and informal feedback from four fab lab users.